

Current Projects
Human Lower Extremity Rehabilitation Exoskeleton Robot
Robot-assisted physical therapy has received a lot of research attention due to its efficacy in providing different forms of human upper or lower extremity physical exercises. In this project, 7 degrees of freedom human lower extremity rehabilitation robot will be developed to maneuver the human lower extremity without compromising any natural movements. The developed robot will be able to provide active, passive, and active assist forms of physical therapy. Different nonlinear control techniques will be developed, and the trajectory performance will be compared to achieve the maximum trajectory tracking performance.
Human Upper Extremity Rehabilitation Exoskeleton Robot
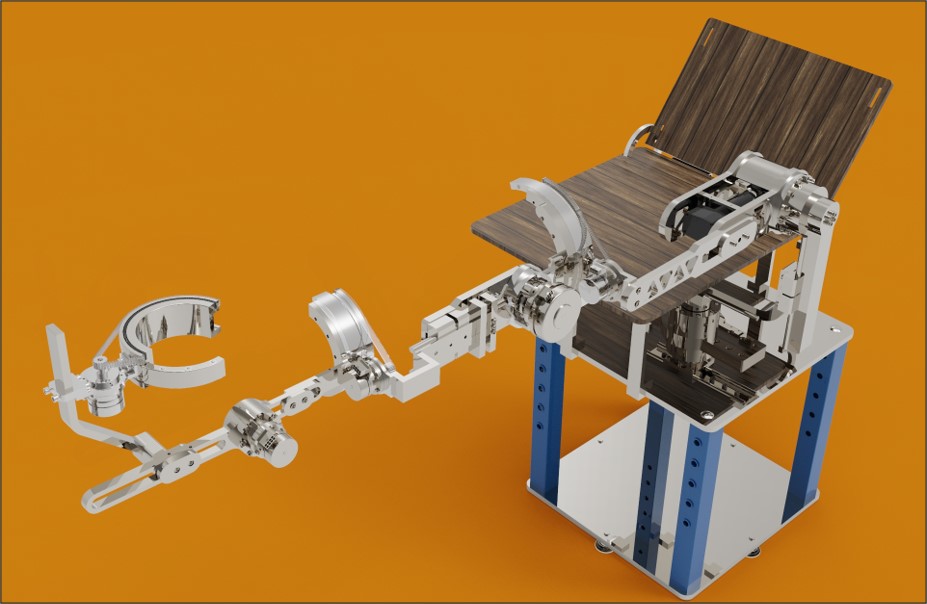
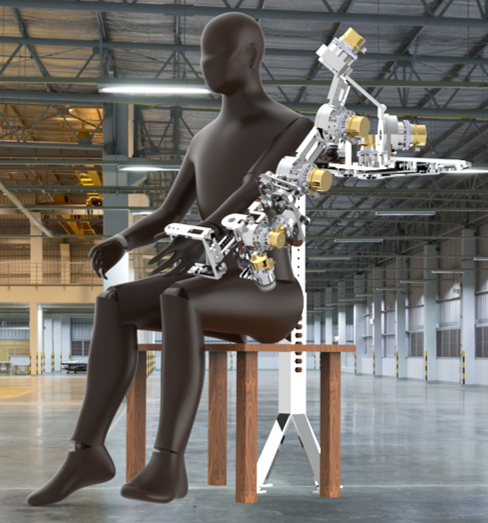
Robotics is a rapidly evolving scientific discipline that has the potential to merge with new technologies. When it is integrated with rehabilitation, it establishes a huge scope of research. This project has focused on the development of a human upper extremity rehabilitation robot that will provide different types of human upper extremity physical exercises tirelessly without compromising any natural movements. A new innovative mechanical design has been introduced by analyzing the existing literature that will provide all sorts of physical therapies more efficiently. A robust nonlinear control scheme will be used to improve the trajectory tracking performance with minimum computational power.
Computer-Supervised Rehabilitation System
Application of IoT in Rehabilitation Robotics